
固定式無(wú)人機(jī)防御_反無(wú)人機(jī)系統(tǒng)_反制無(wú)人機(jī)一體化管控平臺(tái)
產(chǎn)品簡(jiǎn)介
安則無(wú)人機(jī)防御一體化管控平臺(tái)固定式Auav-g02是為了應(yīng)對(duì)小型無(wú)人機(jī)的安全威脅和應(yīng)對(duì)突發(fā)情況開發(fā)的版本。產(chǎn)品可以實(shí)現(xiàn)在固定區(qū)域場(chǎng)所的工程化部署,實(shí)現(xiàn)自動(dòng)探測(cè),自動(dòng)跟蹤,自動(dòng)攻擊一體的24小時(shí)無(wú)人值守。設(shè)備模塊化管理、操作簡(jiǎn)單,可以根據(jù)實(shí)際情況快速組裝和部署。通過(guò)無(wú)線電或者雷達(dá)的方式自動(dòng)檢測(cè)無(wú)人機(jī),跟蹤鎖定后干擾無(wú)人機(jī)的數(shù)據(jù)鏈路和定位系統(tǒng),切斷無(wú)人機(jī)的導(dǎo)航,以及與遙控器之間的通訊,從而迫使無(wú)人機(jī)自動(dòng)降落或?qū)⑵潋?qū)離,保障低空空域安全。
產(chǎn)品特征
模塊設(shè)計(jì):產(chǎn)品探測(cè)系統(tǒng)采用模塊化設(shè)計(jì)方案,可以自由選擇探測(cè)系統(tǒng)
主流頻段壓制:主流頻段檢測(cè)與干擾,覆蓋主流無(wú)線電通信頻段
標(biāo)準(zhǔn)市電:設(shè)備采用標(biāo)準(zhǔn)220V市電,無(wú)需動(dòng)力電裝置。
組裝簡(jiǎn)單:模塊化結(jié)構(gòu)設(shè)計(jì),便于取電和組裝
工程方案:設(shè)備根據(jù)不同客戶場(chǎng)景,進(jìn)行工程化部署,確保最優(yōu)效果
人工工學(xué):人體工程學(xué)設(shè)計(jì),操作簡(jiǎn)單便利
模式可選:用戶可以選擇無(wú)人值守模式或者手動(dòng)控制模式
干擾距離:發(fā)射功率可調(diào),干擾距離1000~1200米
命中率高:360度全向檢測(cè)與干擾,無(wú)需精確瞄準(zhǔn)
復(fù)雜氣象:支持復(fù)雜氣象條件下的探測(cè)與打擊,包括霧霾,薄霧,6級(jí)以下大風(fēng),小雨。
主要功能:
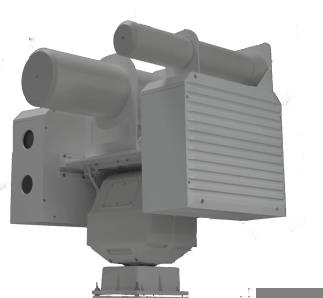
雷達(dá)探測(cè)系統(tǒng):
主要采用雷達(dá)作為探測(cè)設(shè)備,能夠?qū)o(wú)人機(jī)、直升機(jī)、滑翔機(jī)及飛艇等設(shè)備進(jìn)行有效的探測(cè)。根據(jù)現(xiàn)場(chǎng)情況,探測(cè)系統(tǒng)采用一臺(tái)主動(dòng)探測(cè)的脈沖雷達(dá)為主要探測(cè)設(shè)備,需對(duì)防護(hù)區(qū)域及周邊低空飛行物全方位360°進(jìn)行搜索探測(cè),具有24小時(shí)連續(xù)工作的能力,在無(wú)人值守狀態(tài)下,全自動(dòng)錄取飛行物目標(biāo)的方位、距離和速度等信息,并將飛行目標(biāo)的速度、方位、距離等信息自動(dòng)傳輸給光電及干擾模塊。
光電跟蹤系統(tǒng):
采用光電跟蹤系統(tǒng)(可見光及紅外熱成像攝像機(jī))作為跟蹤取證設(shè)備,通過(guò)控制系統(tǒng)獲取探測(cè)設(shè)備定位信號(hào),自動(dòng)鎖定跟蹤低空飛行物,通過(guò)視覺算法自動(dòng)比對(duì)不明飛行物,對(duì)疑似無(wú)人機(jī)自動(dòng)鎖定跟蹤,實(shí)現(xiàn)24小時(shí)自動(dòng)不間斷監(jiān)控取證。

電磁壓制系統(tǒng):
采用固定式干擾機(jī),通過(guò)控制中心獲取探測(cè)設(shè)備發(fā)出的定位信號(hào),跟蹤低空飛行物并發(fā)射電磁信號(hào),實(shí)現(xiàn)對(duì)主流無(wú)人機(jī)實(shí)施自動(dòng)干擾,致其返航或迫降。
中心控制系統(tǒng):
控制系統(tǒng)基于以太網(wǎng)架構(gòu),分為綜合控制系統(tǒng)、光電控制系統(tǒng)、干擾控制系統(tǒng)三個(gè)部分組成,主要設(shè)備有交換機(jī)、服務(wù)器、輸出終端、機(jī)柜及操作臺(tái)組成,集中布置于車內(nèi)。綜合控制系統(tǒng),主要顯示探測(cè)設(shè)備及設(shè)備控制部分畫面;光電跟蹤系統(tǒng),主要顯示可見光及紅外熱成像圖像,對(duì)空中飛行的不明飛行物進(jìn)行視覺算法判斷;干擾控制系統(tǒng),主要顯示干擾系統(tǒng)狀態(tài)、手動(dòng)干擾/自動(dòng)干擾模式切換。各子系統(tǒng)設(shè)備配置需滿足整個(gè)系統(tǒng)順暢運(yùn)行要求,同時(shí)為便于監(jiān)控,三個(gè)子系統(tǒng)顯示終端集中放置于操作臺(tái)。

性能指標(biāo)
雷達(dá)探測(cè):
工作頻段:Ku波段
發(fā)現(xiàn)頻率:Pd=0.8,虛警率:Pfa=10,反射面:0.01m,探測(cè)距離:2km
天線扇掃范圍:0°~360°
目標(biāo)徑向速度:3km/h~72km/h
最小探測(cè)距離:≥200m
測(cè)距精度:≤15m
方位精度:≤0.5°
距離分辨率:≤15m
方位分辨率:≤2°
光學(xué)探測(cè):
探測(cè)距離:≥1km
距離分辨率:≤15m
方位分辨率:≤1°
干擾參數(shù)
發(fā)射功率:最大10w,三擋可調(diào)節(jié)
有效距離:1000~1200米
干擾模式:無(wú)人機(jī)驅(qū)離/無(wú)人機(jī)迫降模式(可選)
重量:75kg
工作溫度:-20~55攝氏度


